さまざまな分野で活用が進むロボット。より社会に役立つロボットを生み出すために、日々、要素技術の研究が進んでいます。今回は、医療や福祉、産業の分野でロボットの活用を進める技術研究に取り組む、九州工業大学大学院生命体工学研究科の高嶋一登先生(以下 高嶋先生)にお話を伺いました。
医療、産業分野を支える要素技術の研究に取り組む
高嶋先生の研究室は、「柔軟なセンサ・アクチュエータの医療、福祉、産業への応用」と「手術シミュレータの開発」に取り組んでおり、その研究内容は多岐にわたっています。例えば、一つ目の研究テーマでは、人に接することもあり、柔らかい素材を利用したり、しなやかな動きをしたりする「やわらかいロボット=ソフトロボティクス」分野の要素技術などを研究しています。「当研究室では、柔らかい素材を使ってアクチュエータやセンサ、ロボットの要素技術を作る研究を進めています。例えば、形状記憶ポリマー、形状記憶合金(SMA)などの形状記憶材料を使った研究もそうです。形状記憶ポリマーは、常温では硬い状態ですが、お湯などである温度以上に加熱すると柔らかくなり自由に形を変えることができます。この状態から冷まし、ある温度以下にすると形状を変えた状態から変形しにくくなる形状固定性を発揮し、再度、ある温度以上に温めると変形させる前の元の形状に回復する形状回復性ももつ材料です。こういったものをロボットに実装できるように研究に取り組んでいます」と高嶋先生は説明下さいました。
注目されるソフトロボティクスですが、従来の工業ロボットの方が優れている点もあるそうです。そこで、その双方の利点を併せ持つ材料として、形状記憶ポリマーに高嶋先生は着目しているそうです。「ロボットが行う作業の正確性の確保や大きな出力が必要な場合は、柔らかいロボットよりも従来のロボットの方が適しています。それを踏まえ、温度によって特性が変わる形状記憶ポリマーを使ってロボットが作業するグリッパーなどの部分の状態を硬軟切り替えられるようにしていきたい。そうすることで、従来のロボットが持つ『正確性』『剛性』と柔らかいロボットが持つ『柔軟性』『自由度』を自在に切り替えられるようになり、よりロボットの活用範囲が広がるのではないかと考えています。」
本来の研究活動に注力できる
教育用4軸ロボットアーム「DOBOT Magician」の採用
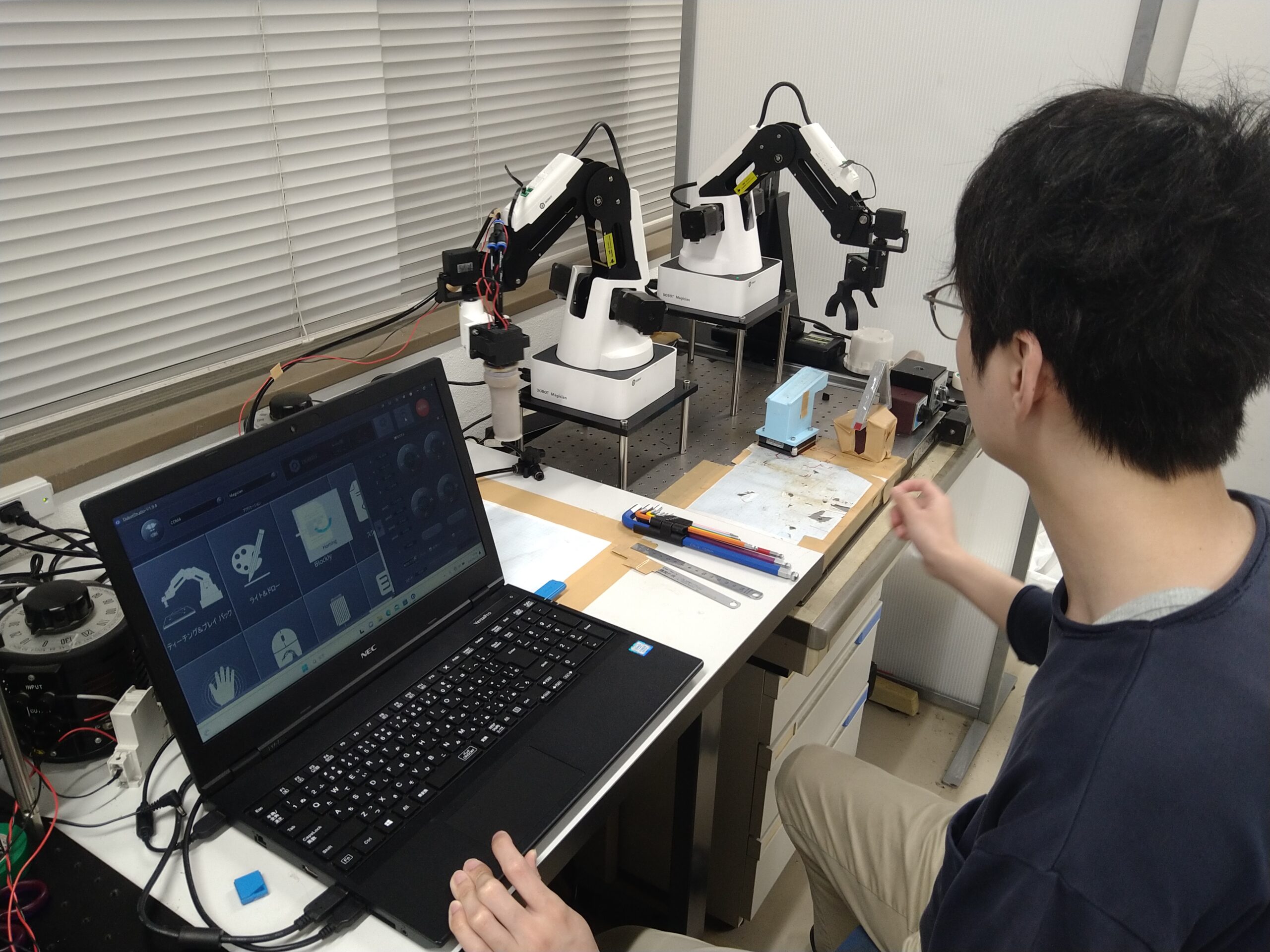
ロボットの可能性を広げる要素技術の研究を進める高嶋先生の研究室では、実際にロボットに研究した要素技術を実装し、機能するのかを検証、評価する必要があります。実際に開発を進めている形状記憶材料とジャミング転移現象※1を組み合わせた「可変剛性リンク」を用いた剛性や形状を自由に変えられるグリッパーを開発し、この評価に教育用4軸ロボットアームDOBOT Magician利用しています。
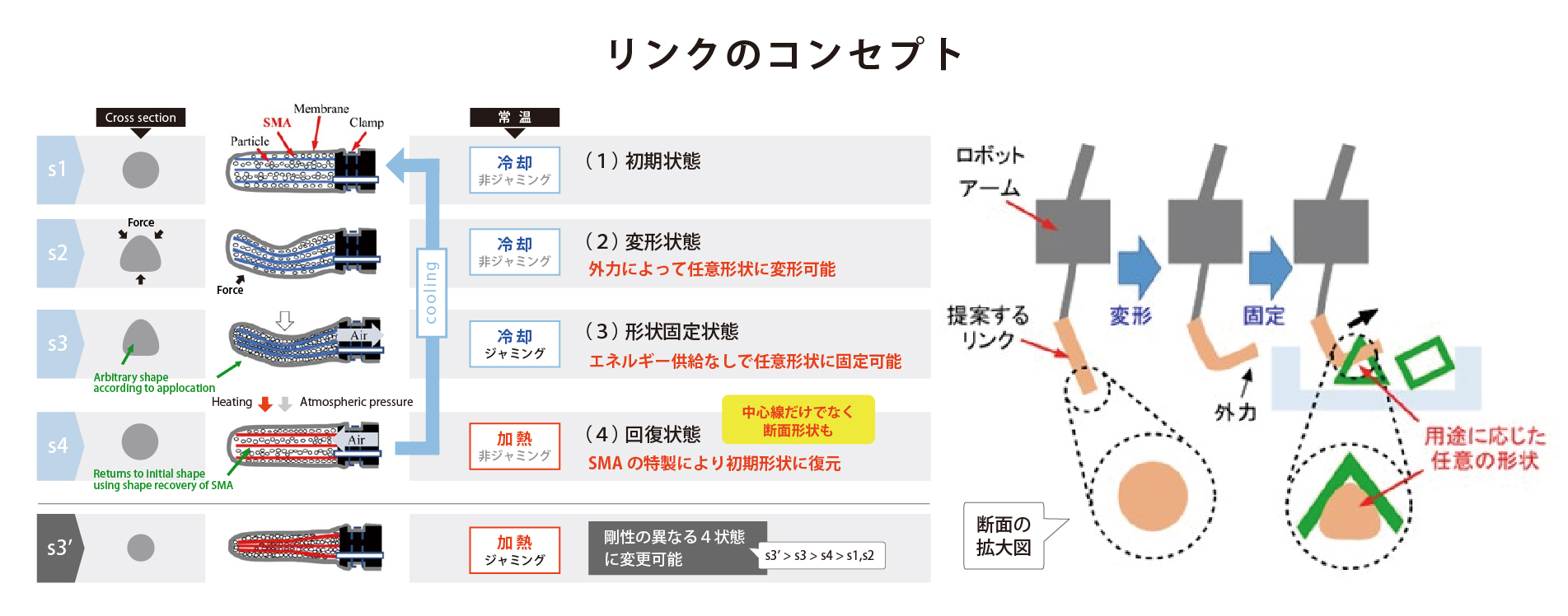
可変剛性リンクは、搬送用ロボットアームへの実装を想定して研究開発したもので、ジャミング転移現象を利用しているグリッパーの中に形状記憶材料を入れ、空気圧と温度で制御することにより、従来もてなかった回復性ももたせたものです。実際には、柔らかい状態(初期状態)で搬送したい物の形状をもつ型に押し付けてグリッパーの形状を変形させ(変形状態)、空気を抜いて形状を固定した後(変形固定状態)、物を搬送することで正確に移動させることができます。そして、加熱することで形状記憶材料の特性を生かして元の状態に戻すことができるので(回復状態)、グリッパーの交換をすることなく、搬送したい物に合わせて形状を変え、さまざまな物に対応できる状態を作り出すことができます。
このリンクの検証、評価について伺うと、「元々は自作でアームを作って行っていましたが、学生によってプログラミングの習熟度に差があり、研究の引継ぎに課題がありました。私たちの研究室が所属する生命体工学研究科は、大学の学部はなく、大学院のみのため、学外の学生も多く、そのため学部で専攻している分野も機械や電気、化学とさまざまでした。そこで、いろいろな学部出身の学生も使うことができ、製造業でも導入されている信頼性のあるロボットアームを探していたところで、見つけたのがDOBOT Magicianです。ビジュアル言語でプログラムできることで、プログラミングが得意ではない学生も詳細を教えなくても直感的に使うことができ、機器の扱いに時間を取られることなく、本来の研究にすぐに取り掛かれることが良いと感じています。また、高専からインターンシップの学生も受け入れているので、すぐに動かせることで、新しい提案や面白いアイディアが出てくるようになっていることもメリットとして大きいですね」と高嶋先生は採用ポイントを教えてくれました。
複数台を組み合わせ搬送業務の効率化を実現するシステムへ
2024年末に岩手県で開かれた第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)での発表では、研究室の学生が2台のDOBOT Magicianを使った双腕ロボットに可変剛性リンクを取り付けた応用例などを発表し、優秀講演賞を受賞しています※2。可変剛性リンクを用いた研究では、これまで1台だったロボットアームを2台組み合わせる動きとしたことで、右手のグリッパーの形状を左手で変形させ、右手で搬送することで、形状変形をロボットだけで行えるシステムへ研究は進んでいます。
最後に、今後の展望について高嶋先生に伺いました。「今後、さらに研究を進め、パレットから物を運ぶ、工程と工程の間の運搬など軽作業に使ってもらえるシステムしていきたいと思っています。さらには、ベルトコンベアも活用し、丸いものが来たら丸い形にして運ぶ、三角の物が来たら三角の形にして運ぶなど、従来グリッパーを変更して作業していたことが、そうすることなく対応して搬送するシステムにしていきたいと考えています。」
今回は、教育用のロボットアームの使いやすさに着目し、研究に活用する機材の習得にかける時間を短くすることで、本来の研究活動へ時間を充てる工夫について、教育への活用だけではない貴重な事例となるお話を伺うことができました。
※1ジャミング転移現象:粒子の集まりが、流体のような状態から固体のような状態に変わる現象。剛性を大きく変更できる機構としてロボットアームのグリッパーなどに利用されている
※2 SI2024 優秀講演表彰
3B1-05 形状記憶合金とジャミング転移現象を用いた可変剛性リンクを搭載した双腕ロボットのピックアンドプレース動作
3B1-09 形状記憶ポリマーを用いた力覚センサによる把持力測定
※DOBOT Magician
※九州工業大学 大学院 生命体工学研究科